Fraunhofer-Institut für Graphische Datenverarbeitung IGD
Fraunhofer-Institut für Graphische Datenverarbeitung IGD
Automotive
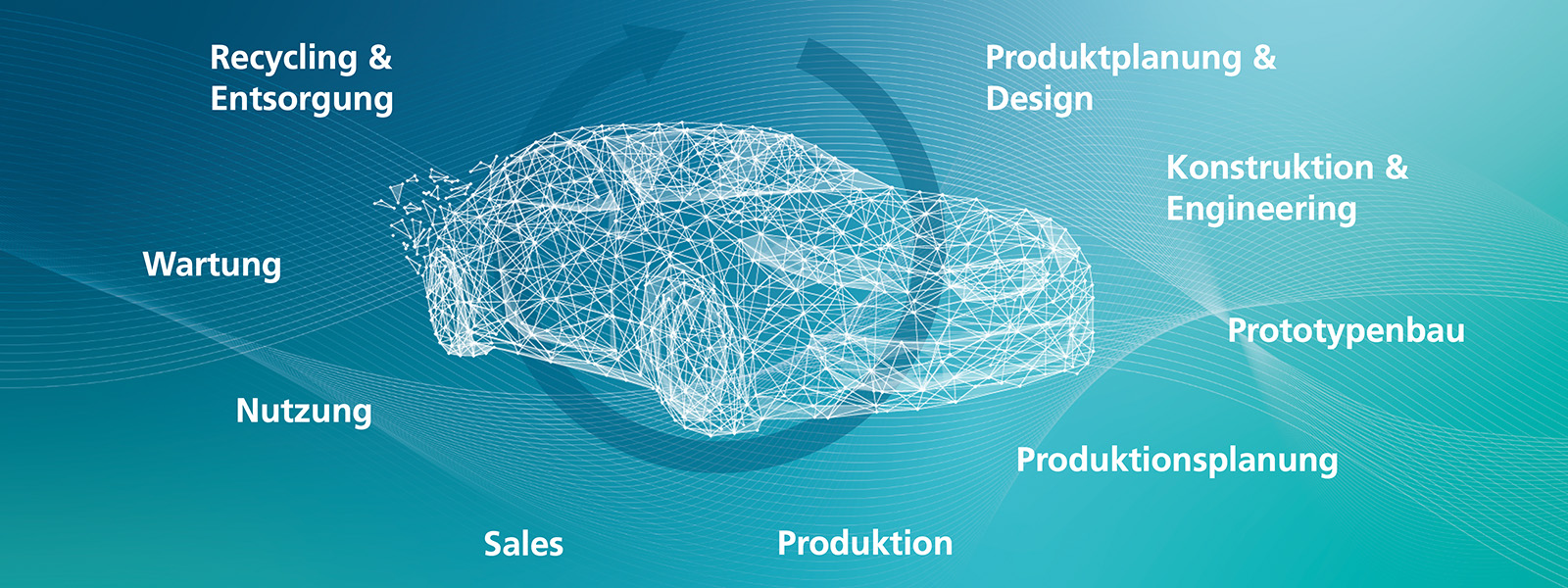
Maßgeschneiderte Software für den automobilen Produktlebenszyklus
Die Automobilbranche befindet sich derzeit in einem der größten Umbrüche ihrer Geschichte, nicht zuletzt aufgrund externer gesellschaftspolitischer Einflüsse. Informationstechnologie und Software (SW) sind seit Jahrzehnten integraler Bestandteil der Entwicklungs- und Produktionsprozesse sowie der automobilen Produkte. Neue technologische Möglichkeiten, z.B. Giga-Casting, erfordern einerseits ein Umdenken bei Entwicklungs- und Produktionsprozessen sowie SW-Werkzeugen. Andererseits eröffnen neue Möglichkeiten im Computing, z.B. generative Künstliche Intelligenz (KI), Maschinelles Lernen (ML), hybrides Computing, etc., Chancen zur
- Effizienzsteigerung, z.B. beim Einsatz im Engineering,
- Umsetzung neuer Konzepte, z.B. der kognitiven Produktion, bzw.
- Steigerung der Leistungsfähigkeit, z.B. in der Bilderkennung für die Qualitätssicherung oder das autonome Fahren.
Mit unserem Competence Center Automotive widmen wird uns Unternehmen der Automobil- und Zuliefererindustrie einschließlich dem Maschinenbau sowie der SW-Industrie, die diese Zweige beliefert. Im Mittelpunkt unserer Forschungs- und Entwicklungstätigkeit steht die Frage, wie intelligente Lösungen beschaffen sein müssen, um vorhandene Daten und Modelle für seine Mitarbeitenden, das Unternehmen und seine Produkte gewinnbringend nutzbar zu machen. Visual-Computing-Technologien sind dabei ein wesentlicher Ansatz am IGD. Mit unseren digitalen Lösungen unterstützen wir unterschiedliche Phasen im Produktlebenszyklus, z.B. das Engineering, die Produktionsplanung sowie Qualitätssicherung und Wartung. Wichtige Ziele bei der Einführung dieser Lösungen sind Effizienz, Genauigkeit, Wiederholbarkeit, Autonomie und Interaktion. Unsere Lösungen ermöglichen das
- Ausbilden, Trainieren und Unterstützen von Personal mittels Mixed Reality und entsprechenden Authoring-Werkzeugen,
- integrative Visualisieren, Analysieren und Erkennen von Zusammenhängen in Daten mittels Explainable AI,
- automatisierte Verarbeiten und Bereitstellen von Daten durch Anwendung von (On-Premise) Sprachmodellen (Large Language Models),
- wirtschaftliche maschinelle Lernen zum Zwecke der Qualitätssicherung basierend auf CAD-Modellen oder Gutbildern,
- schnelle virtuelle Simulieren von physikalischen Phänomenen,
- autonome 3D-Erfassen und Bearbeiten von Bauteilen - auch im Produktionsprozess,
- automatisierte Verarbeiten von großen Punktwolken, z.B. von Produktionsstätten sowie
- automatisierte Optimieren und Verarbeiten von großen diskreten Geometrien, wie Dreiecks- oder Tetraedernetze, unter Erhaltung von Features und Metadaten.
Einige dieser Lösungen finden bereits seit Jahren Einsatz im Automobilsektor und haben dort zu signifikanten Prozessverbesserungen / -automatisierungen und zu Kosten- und Zeiteinsparung geführt. Das verbundene Knowhow setzen wir bei der Anpassung an kundenspezifische Anforderungen oder Realisierung kundenspezifischer Lösungen ein.
Unser konkretes Angebot
Für alle Phasen des automobilen Lebenszyklus